 Veronte¶
Veronte¶
Unit name¶
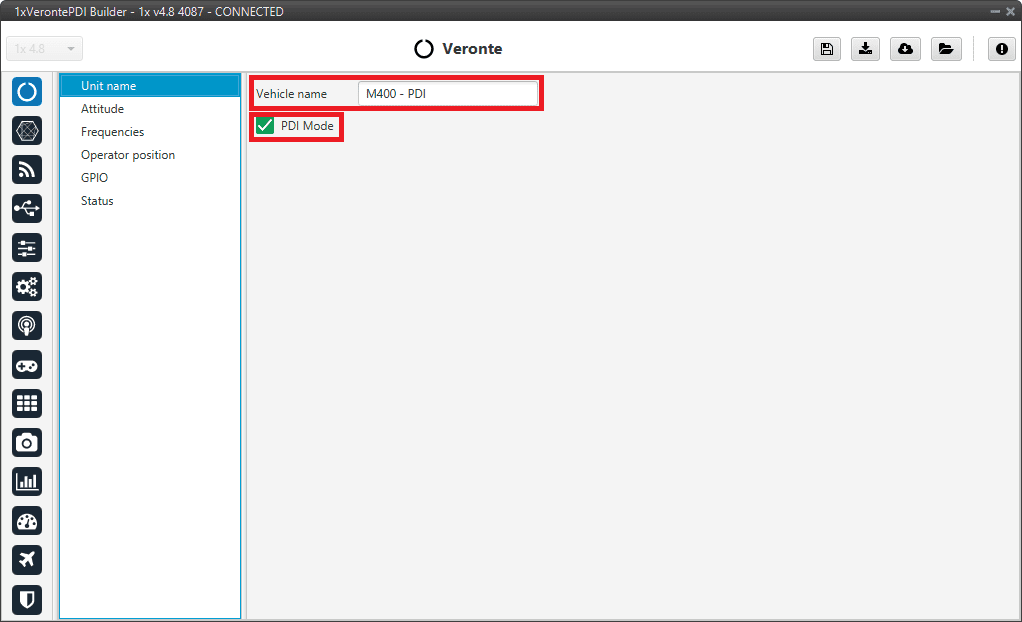
Unit name panel¶
Vehicle name: The user can define the name of the configuration.
PDI Mode: It can be enabled or disabled. PDI mode allows the user to change the setup if Autopilot 1x is not in INI phase.
Warning
Not being in PDI mode, users cannot perform the following actions if they are not in INI phase:
Reboot Autopilot 1x
Change 1x setup (i.e. save to SD card)
Enter manually in maintenance mode
The variable ‘System error’ prevents operation in normal mode (not PDI mode). A list of all errors that can cause this bit to be set can be found in the Activation System Error bits section of the 1x Software Manual.
If Autopilot 1x has ‘sensors errors’ and is in normal mode (not PDI mode), the user will not be able to switch to another flight phase, it will remain in INI phase.
Danger
PDI mode is intended for development purposes since, as detailed above, it allows flight phase changes with system, sensor and PDI errors.
It is highly recommended to limit its use to simulation and ground testing of peripherals during the development phase.
Therefore, as it is not advisable to operate in PDI mode, please disable it once the configuration is finished and intended to be used in flight.
Attitude¶
This menu allows the user to define the orientation of the autopilot with respect to the platform once it is installed. Aircraft axis are defined according to international aviation convention. Autopilot 1x axis are drawn on the autopilot’s external case as defined in the Orientation - Hardware Installation section of the 1x Hardware Manual.
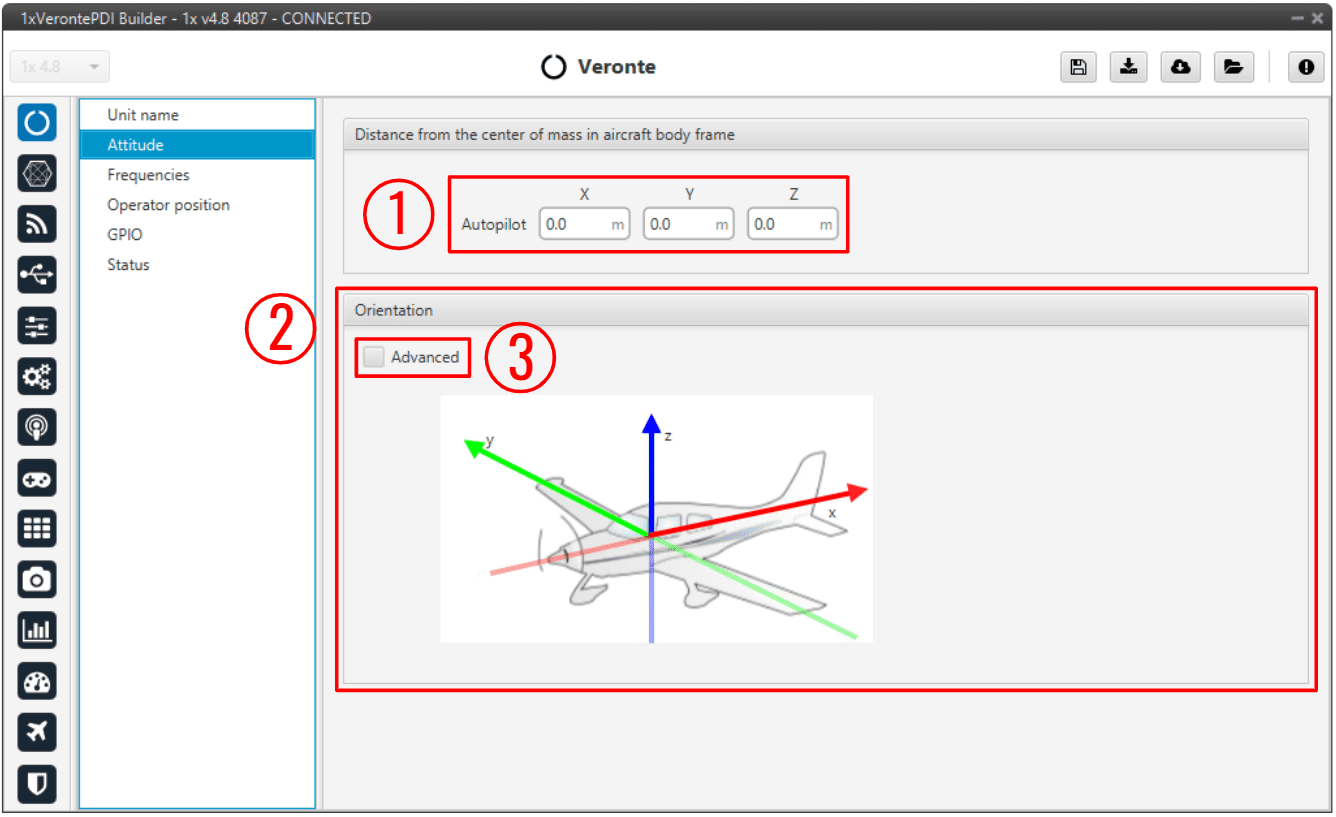
Attitude panel¶
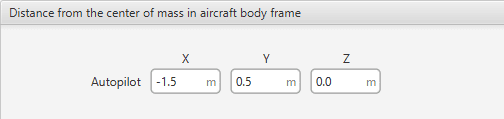
Distance from the center of mass in aircraft body frame: The autopilot’s distance from the center of mass must be defined. This distance is entered in meters and accordingly to aircraft axis.
If the autopilot is not located in the center of mass, it will measure a non-zero acceleration when turning. Distance from the center of mass in aircraft body frame is used to compensate this value. An example is presented below:
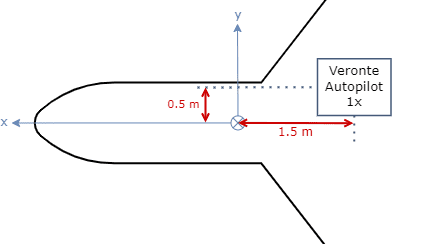
Distance from the center of mass in aircraft body frame - Example¶
Distance from the center of mass in aircraft body frame - Example¶
Orientation: It is not compulsory to install the autopilot aligned with the aircraft axis. In order to indicate the autopilot’s relative position inside the platform, select the advanced option (3). A matrix relating vehicle axis and autopilot axis is needed to be filled in. The case of a non-orthogonal installation can be covered.
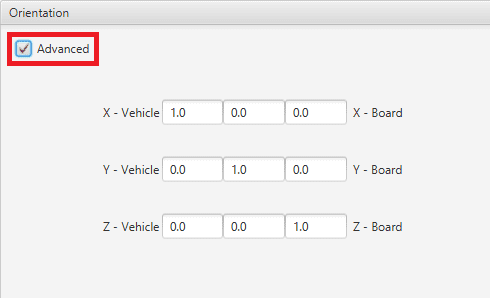
Advanced orientation¶
Note
If only a simple rotation is required, for example, a -90º rotation in the Z axis, it is simpler to select the correct axis directly in the ‘plane’:
Change orientation¶
Frequencies¶
The frequency of the GNC task refers to the maximum working frequency of the core. In this case, 400 Hz, which is the maximum possible.
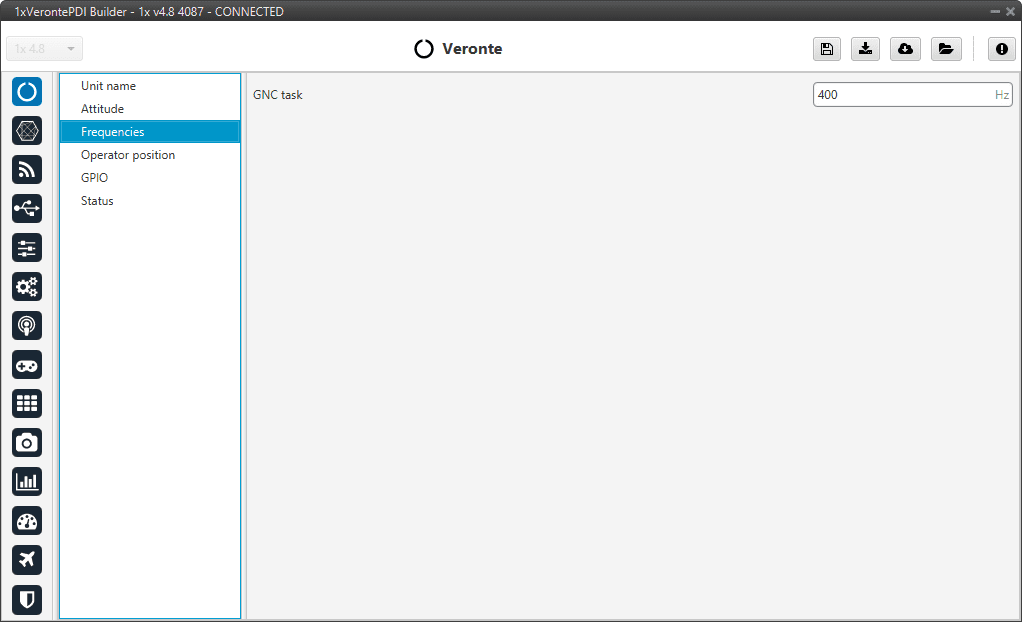
Frequencies panel¶
Warning
400 Hz can be used only for simple configurations, so it is often necessary to reduce the frequency to 250-300 Hz. To find out why the user should reduce the GNC Task frequency, see Reduce GNC Task frequency - Troubleshooting section of this manual.
Operator position¶
From the operator position defined in this panel, the distance allowed by the license to operate is calculated.
Remember that Veronte Autopilot 1x has limited-operation depending on the license status.
For more information on this limitation, please refer to the Limited Operation - Quick Start section of the 1x Hardware Manual.
In addition, users can find information on how to update the license to operate in the Platform license - Platform section of the Veronte Ops user manual.
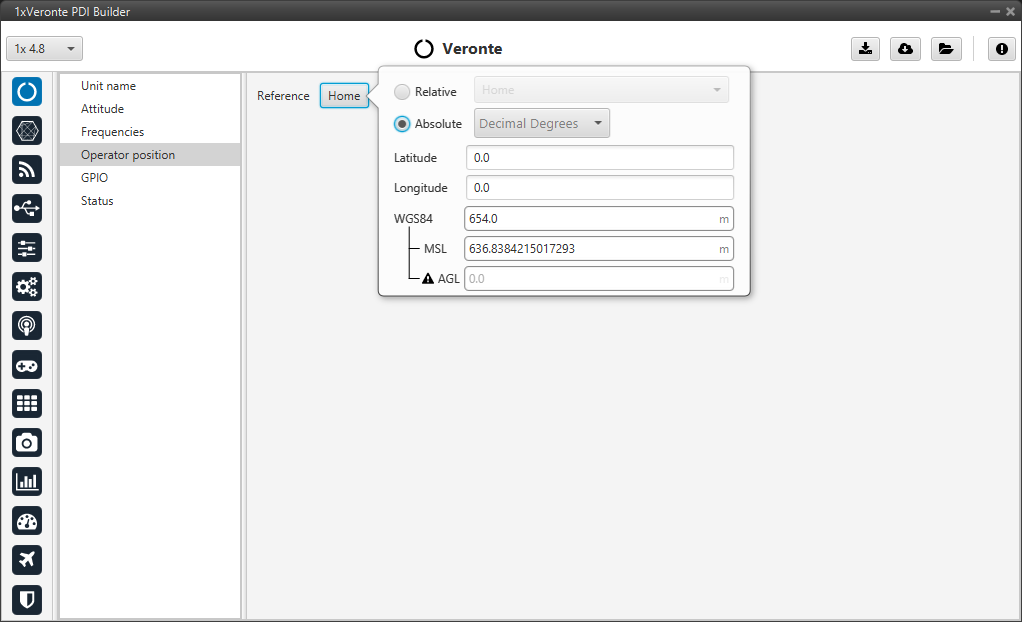
Operator position panel¶
Users must set as Reference point the position that Autopilot 1x system onboard should take as the operator position; this normally coincides with the Home point or the GCS location.
Tip
For operation, in the 1x air unit, it is recommended to set the position of the GCS position as the operator position.
Autopilot 1x allows the user to define this position in two ways: by specifying an absolute position or by setting a relative position to a known point.
Absolute Position
The user can choose from the following systems:
Decimal Degrees: Coordinates in decimal degrees for latitude and longitude.
Degrees º’”: Coordinates in degrees, minutes, and seconds for latitude and longitude.
UTM (Universal Transverse Mercator): Uses X (Easting) and Y (Northing) coordinates, UTM zone, and hemisphere (North or South).
MGRS (Military Grid Reference System): Uses a single alphanumeric string to define the position.

To establish the absolute position, configure the following parameters according to the selected system:
Latitude and Longitude: (For Decimal or Degree systems) Enter the latitude and longitude in the corresponding format.
UTM Coordinates:
X (Easting) and Y (Northing): Enter the UTM coordinates.
UTM Zone: Specify the corresponding UTM zone.
Hemisphere: Indicate whether it is the Northern or Southern Hemisphere.
MGRS Coordinate: Enter the complete alphanumeric string representing the location.
Altitude: Height above the WGS84 ellipsoid expressed in meters.
Important
This parameter is common to all systems.
Relative Position
The relative position allows the user to define the operator position with respect to another point. To do this, fill in the following parameters:
Reference Point: Select the reference point within the system that will be used to define the operator relative position.
North: Distance in meters north from the reference point.
East: Distance in meters east from the reference point.
Down: Distance in meters down from the reference point.
GPIO¶
In this tab each individual GPIO behavior can be configured:
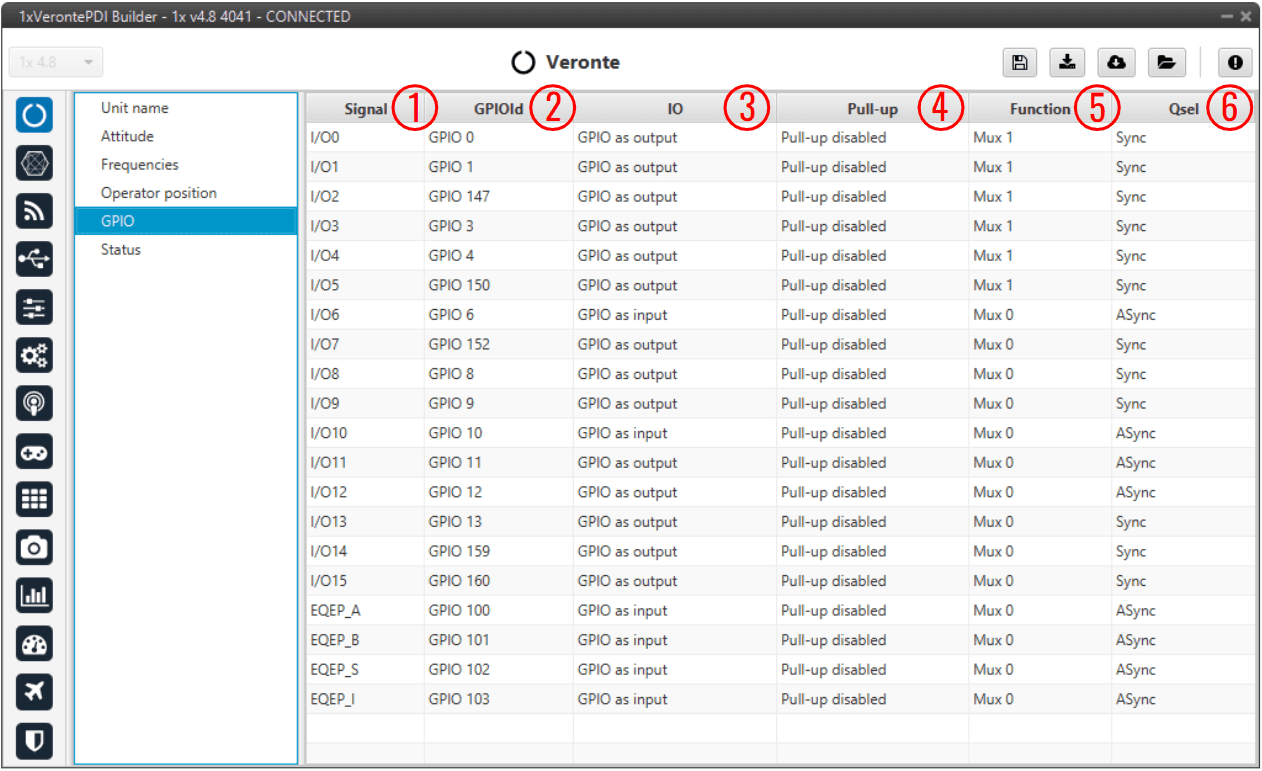
GPIO panel¶
Signal: Pin ID as described in Pinout - Hardware Installation section of the 1x Hardware Manual.
GPIOId: GPIO ID of the microcontroller.
IO: Define GPIO as an input or output.
Pull-up: Enable or disable the pull-up resistance.
Function: Mux 0: GPIO, Mux 1: PWM, Mux 2, Mux 3, etc. These are the different functionalities that the GPIO can have, this depends on the multiplexer.
Note
When users set Function to “Mux 1”, it indicates that the corresponding pin is disabled as GPIO and enabled as PWM. Consequently, when saving this change, the corresponding PWM pin of the PWM panel should automatically be added as PWM and “disappear” as GPIO.
This behavior also happens the other way around, i.e. when switching from PWM (Mux 1) to GPIO (Mux 0).
Warning
Once the change has been saved, check that the corresponding PWM pin has been added to the PWM panel or that the corresponding GPIO pin has been added to the GPIO panel, depending on the change that has been made.
Qsel: This is the “input qualification”, it is used to control how the value of a GPIO is evaluated. The available options are:
Sync: The value is taken as whatever is present at the time it is checked (synchronously). This is the default mode of all GPIO pins.
3 Samples: The value is checked 3 times and the value is only changed when the 3 times are the same.
6 Samples: Same as before, but checking 6 times instead of 3.
ASync: No checks are performed. It is used when it is not used as GPIO.
Status¶
This option enables the periodic sending of the status message that Veronte Link uses to recognize the Autopilot 1x.
Status panel¶
Period: Enter a desired period to send repeatedly the status message.
Note
VCP is the Veronte Communication Protocol. To know more, read the VCP user manual.